 jacky carlingue, le 19 janvier 2012 - 19:41 , dit :
jacky carlingue, le 19 janvier 2012 - 19:41 , dit :

à toujours employé la terminologie Dynamo Tachymétrique ou DT. Cela soulève pour moi plusieurs interrogations:
JC
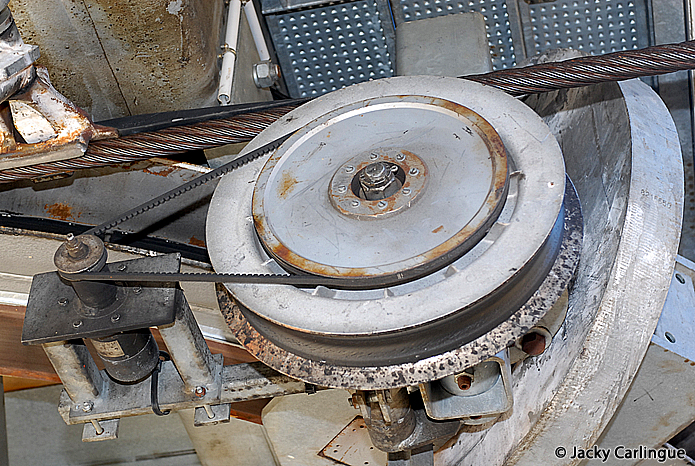
Merci pour les photos.
Pour la terminologie il faut se méfier un peu car même si techniquement un génératrice tachymétrique (appelée aussi tachy par simplification) et un codeur incrémental sont deux appareils totalement différents, à l'usage dans certains domaines il arrive que des non spécialistes confondent, surtout pour des entraînements à vitesse variable où l'on trouve désormais souvent des codeurs incrémentaux pour la saisie de la vitesse de rotation de l'arbre d'un moteur électrique alors qu'avant on recourait aux génératrices tachymétriques pour la même application.
Les grands variateurs de fréquence et régulateurs courant continu modernes sont conçus pour un feedack vitesse (signal de mesure de vitesse effective) par codeur ou tachy.
Citation
1/ Quel est l'intérêt de faire cohabiter ces deux systèmes sur une même installation?
A mon avis aucun, les raisons sont généralement d'ordre historique, en relation avec la conception de la commande.
Les tachys existent depuis très longtemps, les codeurs incrémentaux sont eux plus récents.
La tachy génère tout simplement une tension de sortie proportionnelle à la vitesse de rotation de l'arbre de la tachy et sur la plaquette signalétique figure la pente de la droite représentant tension de sortie en fonction de la vitesse angulaire, par exemple 20 V à 1000 1/mn (donc 0 V à l'arrêt, 10 V à 500 tours/minute etc., en théorie c'est linéaire). La polarité change avec l'inversion du sens de rotation. Il ne faut évidemment pas surcharger la tachy car cela fausserait la mesure de vitesse, ni dépasser la vitesse maximale.
L'avantage du signal analogique de tension d'une tachy est sa facilité de traitement par la commande et son niveau élevé (plusieurs volts à plus de 200 V à vitesse maximale), un relais de surveillance de tension permet de jouer le rôle de détecteur de survitesse ou de sous-vitesse, un simple voltmètre affiche la vitesse (cadran à adapter ou, dans le cas d'afficheur digital, il faut pouvoir paramétriser la fin d'échelle).
Exemple de fabricants de tachys, ils sont devenus plus rares, en Europe les plus connus sont Hübner Berlin (racheté par Baumer) et Radio-Energie (racheté par Precilec, rien à voir avec Radio NRJ dont le nom est apparu bien plus tard

):
http://www.baumerhue...achos.html?&L=1
http://www.precilec....ticles.php?id=3
Il existe aussi des fausses tachys qui comprennent un codeur et une électronique avec un convertisseur fréquence/tension. On peut aussi utiliser un codeur incrémental et un convertisseur fréquence/tension séparé sous forme de module électronique pour remplacer une tachy existante (certains codeurs ont même un boîtier de tachy pour faciliter le remplacement).
Les tachys sont très robustes car sans électronique mais ont souvent encore des balais. Leurs désavantages résident dans leur prix élevé ainsi que l'erreur de non-linéarité, l'influence de la température qui entraîne une dérive, le vieillissement qui affecte la précision etc., désavantages qui concernent d'ailleurs tous les systèmes analogiques. A noter qu'il y a quelques années sont apparues des tachys à boîtiers beaucoup plus compacts et fragiles que ceux des tachys traditionnelles, y.c. des tachys sans balais et sans roulements (montage du rotor flottant directement en bout d'arbre).
Les codeurs incrémentaux n'ont eux pas de dérive vu que le nombre d'impulsions par tour est lié à la construction et ne varie évidemment pas au cours du temps (je simplifie car pour les très hautes résolutions c'est un peu plus compliqué que le principe de la roue à encoches et le nombre d'impulsions par tour est bien supérieur aux incréments physiquement présents sur les disques de codage, voir p.ex. les infos chez Heidenhain, il existe de codeurs absolus avec plus de deux millions d'impusions par tour). La quasi totalité des codeurs incrémentaux ou absolus intègrent de l'électronique. Il existe des codeurs incrémentaux sans aucune électronique ni raccordement électrique, avec transmission par fibre optiques vers une unité électronique, on les utilise p.ex. pour certains téléphériques ou encore pour des appareils à résonance magnétique nucléaire mais ils sont très peu répandus (pour la petit histoire il existe aussi des microphones et des accéléromètres sans composant électrique côté détecteur, la transmission se faisant par fibre optique, donc impossible à détecter et à brouiller aves les moyens usuels
).
Les signaux de sortie d'impulsions des codeurs incrémentaux sont de bas niveau (quelques volts et des courant très bas), ils sont plus délicats à interfacer que les signaux issus des tachys et leur transmission est plus sensibles aux champs électromagnétiques perturbateurs. Les codeurs incrémentaux et absolus sont souvent utilisés dans des installations modernes comprenant des systèmes à microprocesseurs car typiquement leur signaux sont utilisés pour déterminer une vitesse de rotation (et accessoirement son sens) et/ou une position en comptant les impulsions.
La vitesse calculée sur la base d'impulsions de codeurs est très précise en pratique car des mesures de temps précises sont faciles à réaliser électroniquement, n'importe quel automate programmable digne de ce nom est équipé d'entrées pour le comptage d'impulsions de codeurs ou peut recevoir un module d'entrée pour codeur incrémental.
Un signal tachy ne peut lui guère être utilisé pour mesurer une distance (donc un nombre de tours) car au fil du temps l'erreur d'intégration croît alors qu'avec un codeur incrémental ce problème ne se pose pas.
En conséquence si on peut utiliser un galet avec tachy pour mesurer une vitesse, pour mesurer une distance, p.ex. pour le cadencement, en l'absence de codeur incrémental il faut un galet avec un dispositif générant des impulsions sinon c'est du bricolage incertain (avec une tachy le cadencement est théoriquement possible mais risque d'être trop aléatoire à long terme et pour une commande moderne ce serait une magouille ridicule).
Pour des raisons historiques il est fort possible que l'on utilise une (ou deux) tachy pour la vitesse du câble, le signal d'une mesure étant p.ex. envoyé à un automate programmable et à un module de surveillance de sens de rotation et de survitesse et l'autre à un 2ème module de surveillance de survitesse. En plus la vitesse du moteur est normalement aussi acquise, ce d'une part à des fins de régulation (mais pas forcément, assez bizarrement certaines RM modernes ont un variateur de fréquence sans feedback vitesse moteur, le feedback vitesse moteur étant uniquement utilisé à des fins de surveillance par la commande programmable mais non pour la régulation de vitesse par le variateur) et d'autre part pour surveiller le synchronisme vitesse du câble/vitesse moteur (permet de détecter le glissement du câble, p.ex. lors de certaines conditions de freinage extrêmes, et la casse dans la chaîne cinématique).
Techniquement pour une commande moderne il n'y a plus aucune raison d'utiliser des tachys. Les codeurs incrémentaux, si de bonne qualité et correctement installés, sont plus fiables (les anciens me contrediront mdr) et surtout ne sont pas sujets à des dérives et autres problèmes de vieillissement et, surtout, chaque codeur permet de connaître la position et, par calcul, la vitesse.
Les problèmes de fiabilité de codeurs en usage en conditions difficiles sont uniquement dus à un mauvais choix de codeur. Très souvent on voit des codeurs inadaptés (question de prix).
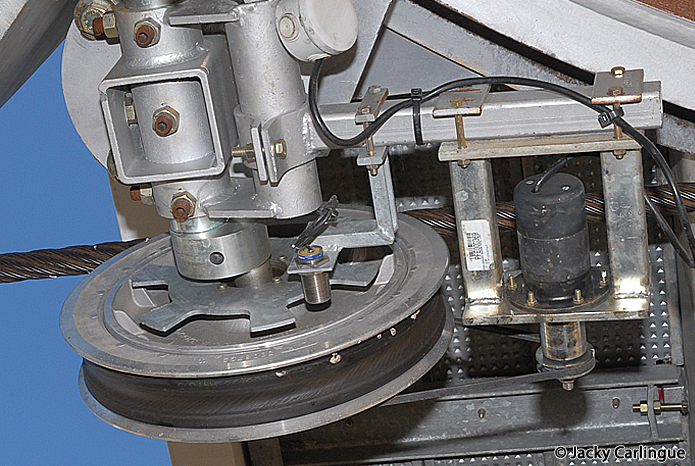
Les galets à roue polaire avec détecteurs inductifs sont une solution robuste mais de résolution grossière (ils correspondent à un codeur incrémental avec nombre de trait très bas), perso je n'installerais que des codeurs incrémentaux vu que ceux-ci permettent de remplir toutes les fonctions et sont disponibles sur catalogue et en partie interchangeables entre différents fabricants alors que les roues polaires sont des cosntruction spécifiques.
Citation
2/ Peux t'on imaginer que les fonctions contrôle de la vitesse et contrôle du sens de marche soit confié à chacun des systèmes (DT pour le sens et détecteur inductif pour la vitesse)? Alors qu'au paravent, la DT assurait les deux fonctions simultanément.
Oui mais cela ne présente pas d'intérêt en pratique car aussi la tachy, que les roues polaires avec 2 détecteurs inductifs décalés et les codeurs permettent de déterminer le sens de rotation et la vitesse (par contre la roue polaire n'est utile pour la vitesse que si le nombre d'encoches est bien plus élevé que les six de l'exemple de la photo).
Citation
3/ Pourquoi doubler la DT sur une motrice (une sur le brin entrant, une sur le brin sortant)?
Pour générer une alarme si le câble se rompt ou se détend entre les deux galets de mesure.
Blague à part, c'est simplement pour des raisons de redondance. Le choix de l'emplacement des galets n'est pas important vu que le câble porteur-tracteur forme une boucle fermée par une épissure, il faut juste réduire le risque de défaillance de cause commune, notamment en évitant de monter les deux galets sur un même support (cela explique aussi pourquoi il faut deux galets de mesure et pas un galet unique avec 2 ou 3 codeurs). Ce qui importe est un entraînement sûr du galet, raison pour laquelle les galets de mesure ne sont en principe pas porteurs et sont simplement appuyés à force à peu près constante contre le câble, p.ex. au moyen d'un système préchargé par ressort(s).
Ce message a été modifié par Velro - 20 janvier 2012 - 15:17 .


 Aide
Aide
 Mont-Comi
Mont-Comi 




 10sami52
10sami52 

 utilise cette astuce.
utilise cette astuce.





