Salut à tous !
Je suis en vacances cette semaine, et j'ai repris les travaux !
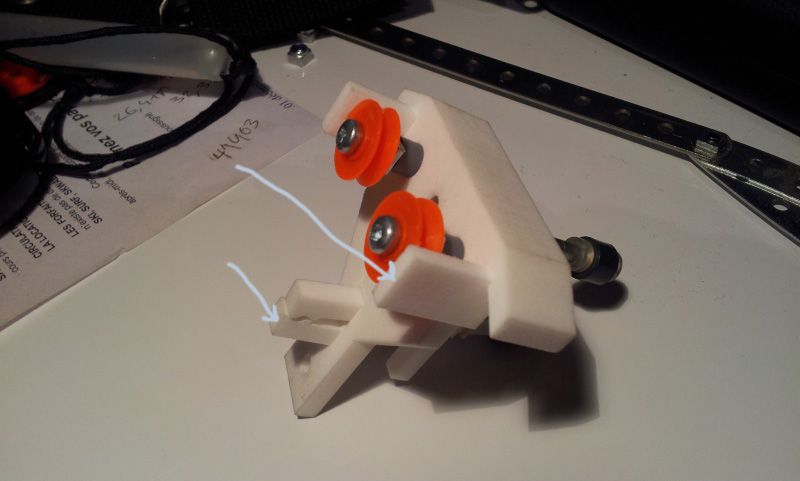
1) La pince entièrement fabriquée par mes propres moyens est terminée :

Il ne manque que le ressort à la place de l'élastique
Cette fois ci il y a un axe pour le mouvement de la pince, le galet pour l'ouvrir n'est qu'une tête de vis, amplement suffisant au niveau des frottements.
Pour l'adhérence sur le câble, les deux parties de la pince étant des U en aluminium il a suffit d'y coincer du caoutchouc.
Je peux vous dire que je n'ai pas hâte de me lancer dans une fabrication en série !

2) J'ai peut être enfin résolu le problème du cadencement :

Voici donc une zone de cadencement des plus classiques, ce sont les deux premiers pneus de mon lanceur.
Le contour repasse donc en taquets, je ne pouvais pas faire une prise en tous points sans devoir changer la structure principale en acier.
Chaque cabine passera donc un certain temps dans le cadencement pour compenser d'éventuels arrêts du contour provoqué par l'anti collisions avec un taquet.
Une dernière photo d'ensemble pour la route :

3) Je suis toujours en réflexion pour la partie commande... Pour rappel, lorsque l'arduino sert d'interface pour le PC, il est trop lent pour travailler à la régulation des moteurs.
Plusieurs idées :
-> Liaison avec l'ordi/arduino + un autre microcontrôleur esclave qui gère la régulation des moteurs
-> Uniquement un microcontrôleur, abandon de l'interface avec le pc, donc une armoire classique avec les boutons marche/arrêt etc.
J'ai beaucoup d'autres idées, du genre bricoler moi même une liaison avec l'ordinateur (sans ralentir le fonctionnement de l'arduino), ou même contrôler le 2S avec une appli smartphone !
Je vous laisse à vos commentaires, dites moi ce que vous pensez de tout cela


 Aide
Aide











 /> Concernant ton système de cadencement, j'y pige plus rien.
/> Concernant ton système de cadencement, j'y pige plus rien.  /> Pourtant mes simulations me semblent concluantes.
/> Pourtant mes simulations me semblent concluantes.

