la Plagne 78, le 11 novembre 2013 - 00:36 , dit :
la Plagne 78, le 11 novembre 2013 - 00:36 , dit :
J'ai réfléchi à une solution au lieu d'arrêter la chaine pour l'anti-collision avec le taquet.
Arrête les deux dernier pneus du ralentisseur et dès que le taquet est passé la cabine s'achemine dans le contour.
Comme ça les autres cabines qui sont dans le contour ne seront pas dé-cadencées.
Cette solution ne fait que décaler le problème :
Cette fois la cabine qui sera stoppée en fin de ralentisseur prendra du retard par rapport a celle dans le contour, et se rapprochera de la suivante encore en ligne.
Le cadenceur que j'ai placé en fin de contour arrêtera plus ou moins longtemps chaque cabine selon son retard pris dans le contour. Ainsi quelque soit les évènements survenus lors du contour, la cabine est toujours en avance par rapport a son heure de départ, et elle attend donc dans le cadenceur.
Comme je l'ai dit je prépare une solution claire et précise, je vous en ferai part prochainement

la Plagne 78, le 11 novembre 2013 - 00:36 , dit :
Physiquement c'est pareil qu'un automate tu branche des capteurs en entrée et des relais en sortie ?
En gros on peut y relier à peu près n'importe quoi, il suffit de savoir ceci :
- En entrée, un arduino observe la tension sur la pin correspondante (0/5V ou 0/3.3V selon comment on alimente l'arduino)
- En sortie, l'arduino crée une tension (encore une fois 0/5V ou 0/3.3V)
- Il ne faut pas utiliser trop de courant en sortie de l'arduino, je déconseille donc de piloter directement la bobine d'un relai par exemple.
Quelques montages simples permettent alors de câbler les entrées et les sorties :
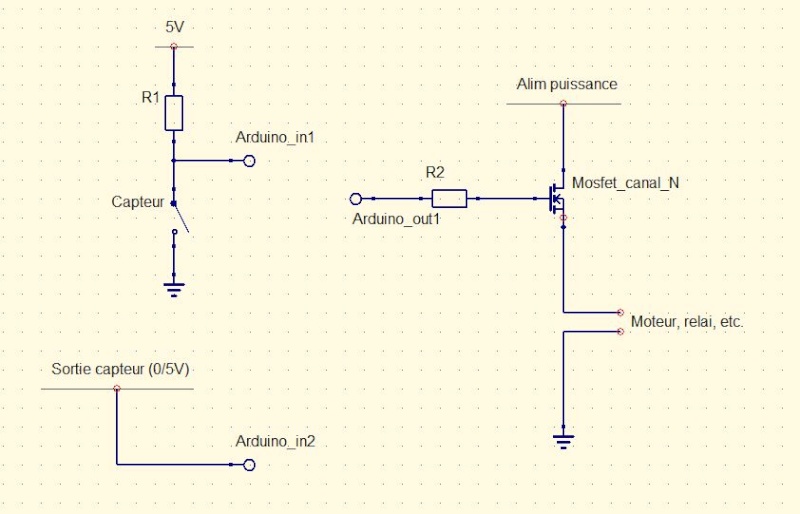
Pour info, un MOSFET est un transistor piloté en tension, il ne consomme donc pas beaucoup de courant. Néanmoins il est possible qu'il y ait un pic de courant lorsqu'il s'ouvre ou se ferme, c'est pour cela que je place une résistance au cas ou.
En entrée j'ai un montage pour les capteurs actifs et un autre pour les capteurs passifs.
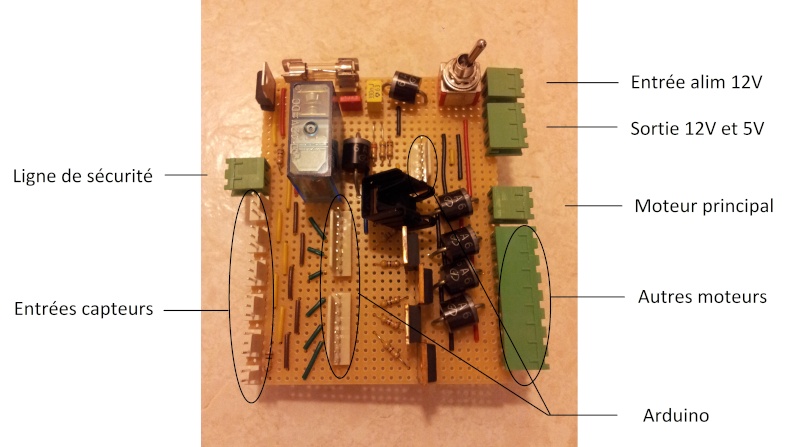
D'ailleurs j'ai quasiment terminé ma carte de puissance pour le pilotage de tous les moteurs d'une gare :

Il manque juste 2 transistors MOSFET (en haut a gauche de la carte).
L'arduino est la carte bleue sur la photo, elle envoie les ordres aux 5 moteurs (le 6e fil est la masse)
L'alimentation des moteurs arrive par le branchement déjà câblé, et les 5 moteurs seront reliées aux prises restantes.
Pour une fois je me suis appliqué dans la connectique, ce sera bien plus pratique pour le montage, l'entretien, etc.
la Plagne 78, le 11 novembre 2013 - 00:36 , dit :
Pourrais tu nous montrer tes cartes électronique Arduino ?
Et nous expliquer comment ça se programme ?
Quel type de langage ladder logigramme Grafcet ???
On voit la carte arduino sur la photo, il y a plein de photo sur internet (J'ai une arduino UNO)
La programmation est très basique (par rapport aux microcontrôleurs "professionnels"), c'est une sorte de langage C :
void setup() // Ici on déclare les entrées, sorties, etc.
{
pinMode(4,OUTPUT); //la pin 4 sera une sortie
pinMode(6,INPUT); //la pin 6 sera une entrée
}
void loop() // Boucle répétée indéfiniment
{
entree = digitalRead(6); //on regarde l'état de la pin 6
digitalWrite(4,entree); //on recopie cet état dans la pin 4
}
Voila voila, on a des boucles, des conditions...
Certaines entrées sont capable de jouer un rôle de voltmètre (entrées analogiques)
Certaines sorties sont également analogiques (signaux PWM) et c'est avec celles ci que je pilote mes moteurs.
Si vous voulez encore plus d'informations n'hésitez pas à poser vos questions !

 Aide
Aide