Bonjour !
Voici une mise à jour technique de cette installation :
Commençons par le garage en gare aval. Il est automatique. Un long convoyeur permet de ranger les cabines. Vue générale :


Ce convoyeur est entrainé par un motoréducteur situé juste à coté de la zone d'injection/déjection des cabines. Il entraine une double chaine à taquets qui entraine la chaine du convoyeur.
Vues du système d'entrainement :


Vue sur le motoréducteur :

Vue sur la chaine d'entrainement :

zoom sur la chaine du convoyeur :

Les cabines reposent sur des supports appelés balancelles. Ces balancelles disposent de leur propre rail de roulement, et sont entrainées par la chaine du convoyeur. Vue sur une balancelle :

Vue sur la liaison entre une balancelle et la chaine du convoyeur :

Le garage dispose de deux voies annexes : une pour la zone de maintenance et une pour stocker la cuve à eau et le plateau de maintenance. Deux aiguillages permettent d'envoyer les cabines sur ces voies. Vue sur les aiguillages :

Ces aiguillages sont actionnés par un vérin électrique :


Ces vérins entrainent des aiguilles situées sur le chemin de roulement des balancelles (dans ces voies, le trainage s'effectue manuellement) :

Sur la voie de stockage, on retrouve la cuve à eau (celle ci n'est plus utilisée depuis que l'eau courante a été amenée au sommet) :

Ainsi que le plateau de maintenance :

Vue sur la zone de maintenance :

Celle ci est divisée en deux parties : la première étant sur la voie normale du garage et servant essentiellement à effectuer le tirage des pinces et la deuxième servant aux opérations plus complexes sur les cabines et les pinces.
Vue sur le dispositif de déplacement des pinces :


A coté, on retrouve les commandes déportées du garage :

Vue sur la zone de rangement :

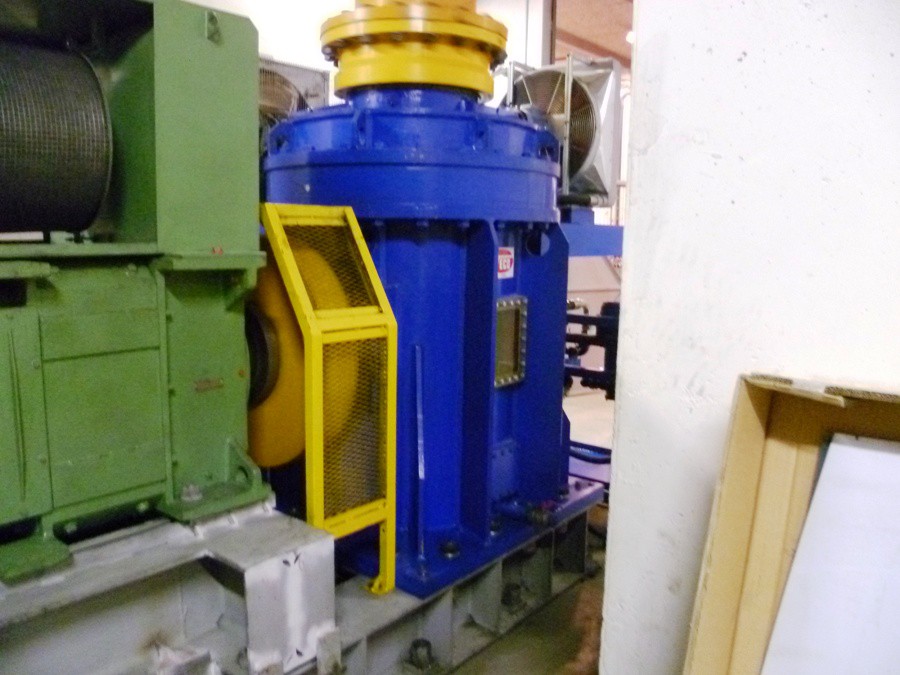
Passons maintenant à l'injection/déjection des cabines. Il s'agit d'un robot qui récupère les cabines sur les balancelles et qui les pose sur la voie, à la fin du contour. Pour ce faire, une partie des pneus peuvent se soulever. On l’appelle la zone relevable.
Vue sur le robot, qui est composé de deux parties, le corps et la tête :



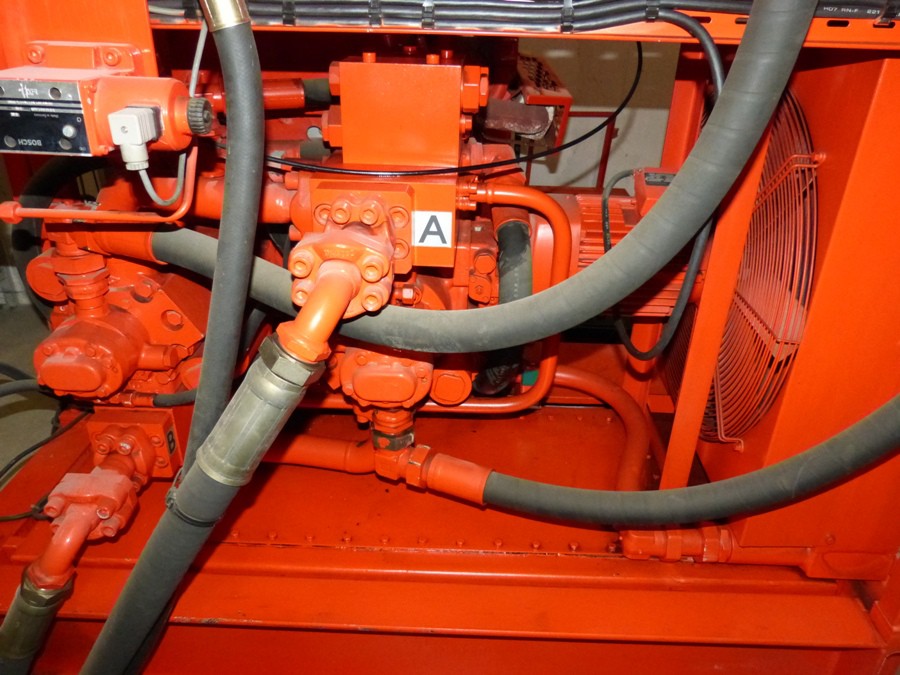
Vue sur la centrale hydraulique contrôlant le robot :

Quand les balancelles arrivent au niveau du robot, elles sont positionnées par un vérin électrique :

Vue sur la zone relevable :


Il est intéressant de noter que la passerelle se relève aussi pour pouvoir faire passer le robot :

Vue sur la zone de pose et dépose dans le contour :

Sur le coté de la photo précédente, on remarque des petits appareils. Ils servent à positionner la pince correctement de manière à ce que la tête du robot la saisisse correctement.
Vue sur un positionneur :

Passons maintenant au trainage dans la gare. Le trainage des cabines se fait par pneus entrainés par différents moteurs et donc sont découpés en différentes zones : Ralentisseur, débarquement, contours (1 à 6), cadenceurs (1 et 2) et lanceur.
Le ralentisseur et le lanceur sont gérés par deux moteurs à courant continu chacun, le débarquement et les cadenceurs sont gérés par un motoréducteur et les contours sont gérés par 5 motoréducteurs par zone (un par pneu).
Vue sur l'arrivée des cabines :

Vue sur la came de débrayage :

Ce galet sert à positionner le câble à bonne hauteur pour le débrayage. On retrouve le même système de l'autre coté, à l'embrayage.

Vue sur le ralentisseur :


Vue sur le motoréducteur de la zone de débarquement :

Vue arrière du contour avec tous les motoréducteurs :

Et depuis le sol :

Zoom sur un motoréducteur :

Vue sur les cadenceurs :

Vue sur les motoréducteurs des cadenceurs (ils entrainent chacun une série de 5 pneus) :

Vue sur le départ du lanceur :

Le lanceur sous le canon :

l'arrivée du câble :

La rampe d'embrayage :

La sortie du lanceur :

Comme expliqué plus haut, les lanceurs et ralentisseurs sont pourvus de deux moteurs à courant continu chacun. En cas de problème sur l'un d'eux, on peut continuer l'exploitation avec un seul moteur.
Vue sur un moteur :

Vues sur le système d'accouplement avec les pneus :


A noter qu'au début de l'exploitation, tous les moteurs avaient cette configuration. Suite à des problèmes avec des cardans, les moteurs situés en dehors des canons ont étés déplacés sur la structure porteuse de lanceurs et ralentisseurs :


Descendons maintenant au sous-sol voir la machinerie. L’installation est entrainée par deux moteurs à courant continu Alsthom développant 365 kW chacun.
Vues générales :


Vue sur le moteur 1 :

La plaque signalétique de ce moteur :

Vue sur la dynamo tachymétrique :

Vues sur le réducteur (à noter que seuls 3 exemplaires ont été fabriqués) :


Zoom sur le système d'injection d'huile de lubrification :

Vue sur l'intérieur du réducteur :

La plaque signalétique du réducteur :

La sortie lente du réducteur :

En cas d'avarie sur la marche principale, un moteur de secours est présent et met en pression un circuit hydraulique. Il est couplé à un groupe électrogène qui se charge d'alimenter toute l’installation.
Vue générale. Le moteur de secours est à gauche et le groupe est à droite :

Vue sur le moteur thermique du groupe de secours :


Vue sur les pompes :

Le réservoir d'huile :

Un coffret électrique est présent :

Tout ceci entraine un moteur hydraulique situé sur une entrée annexe du réducteur :

La plaque signalétique du moteur hydraulique :

Le système d'accouplement du moteur de secours :

A noter qu'un réducteur de secours est présent :

Vue sur le groupe électrogène :

Vue sur son moteur thermique :

Vue sur son alternateur :

Le disjoncteur :

Remontons maintenant en gare au milieu des voies, on peut apercevoir l'armoire du téléphone ainsi que des fusibles de lignes :

De l'autre coté se trouve la centrale des freins :

Vue de plus prés :

Vu sur les frein. Les freins de service et d'urgence sont sur la poulie motrice :

Vu sur les freins de service :

Et sur les freins d'urgence :

Vue depuis le sol :

Allons voir le pupitre de commande. Vue générale :

Vue sur le pupitre de commande :

Celui-ci comprend une partie pour la gestion du garage :

Une autre sert à la gestion de la marche et des arrêts :

Une autre sert à la gestion de la marche de secours :

Au dessus de tout ceci, nous retrouvons la signalisation des différents états du télécabine :

A coté, sont présents les deux groupes de sécurités de la ligne :

Et enfin, les anémomètres :

Au dessus de tout ceci, est présent un écran regroupant toutes les informations de la télécabine :

En se retournant, d'autres armoires sont présentes :

On retrouve le pesage, ainsi que les différents choix de marches :

A coté, on retrouve la gestion du moteur thermique de secours ainsi que le groupe électrogène :

Au sous-sol, dans le local de la machinerie, on retrouve les armoires de puissances. Vue générale :

Vue sur les variateurs de vitesse :


Vue sur l’alimentation des trainages en gare :

Vue sur l'armoire de distribution :

Passons maintenant à la gare amont. C'est elle qui a en charge la tension de la ligne.
Vue générale :



Le système de trainage en gare est similaire à la gare aval.
Vue sur la poulie retour :

Deux vérins sont présents pour effectuer la tension. Néanmoins, on peut exploiter la télécabine avec un seul vérin.

Vue de dessus :

Vue sur la centrale hydraulique de tension :


Celle-ci est composée de deux circuits hydrauliques : un pour l'exploitation à deux vérins et un pour l'exploitation à un seul vérin.
Vues sur les trainages de gare :


Zoom sur le capteur de pesage des pinces :

Un robot est présent à l’arrière de la gare pour permettre de décycler une cabine en cas d'avarie grave. Néanmoins, celui-ci n'a jamais été utilisé.


Le système est similaire à la gare aval, néanmoins, ici, tout est géré manuellement. Une zone relevable est présente :



Le robot possède une centrale hydraulique :

Qui alimente sa tête :

Pour faire sortir une cabine, il est nécessaire de relever le quai :

De relever la zone relevable avec une pince correctement positionnée :

Ensuite, il faut amener la tête du robot en position :

Celui-ci soulève la pince :

Et on peut sortir la cabine :


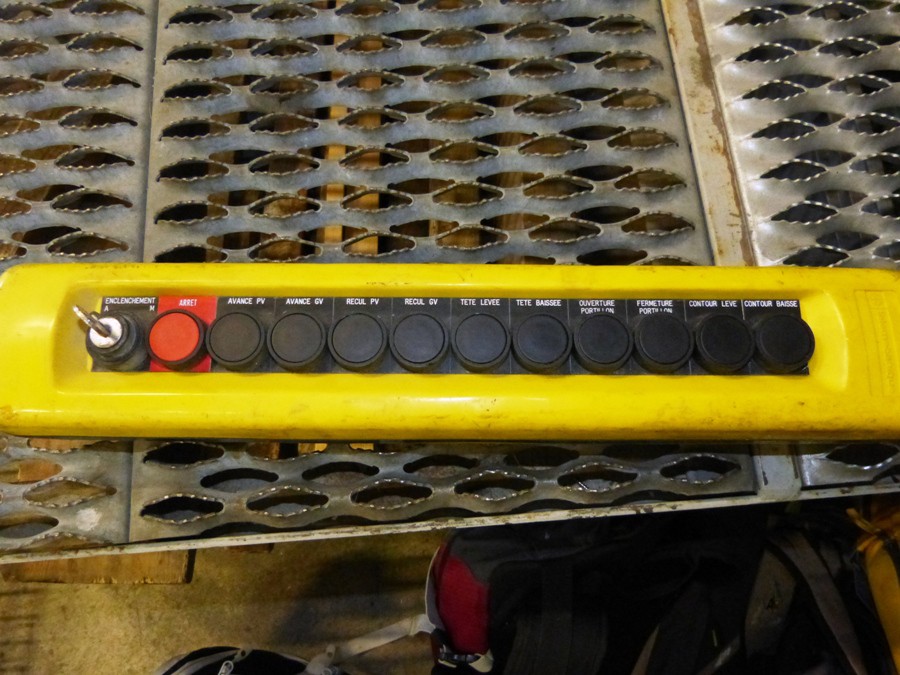
Le robot est contrôlé par cette télécommande :
Juste à coté de celle-ci, on retrouve les brancards servant à descendre les blessés :

Ceux-ci sont prévus pour aller dans deux cabines spécifiques : la 1 et la 11. Celles-ci sont toujours cyclées à l'opposé l'une de l'autre. Une fenêtre est présente sur ces cabines. C'est par là que l'on fait entrer les blessés sur les brancards :

En cas de panne de courant, un groupe électrogène est présent pour alimenter la gare :


Vue sur le moteur thermique :

Vue sur l’alternateur :

Vue sur la plaque de l'alternateur :

Passons maintenant au pupitre :

Vue générale :

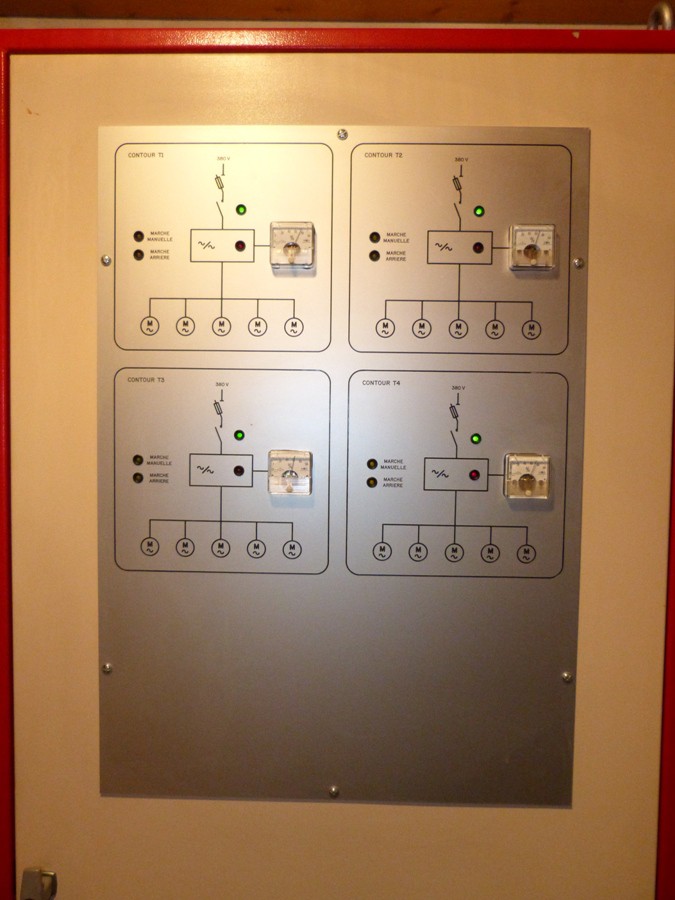
On retrouve sur ces armoires le pesage des pinces, le contrôle de la zone relevable ainsi que le contrôle du trainage :

A coté, on retrouve l'écran de supervision, et les voyants indiquant les différents états de la machinerie :

Enfin, à coté, on retrouve le panneau de gestion du groupe électrogène :

A l'étage, on retrouve les armoires de puissances de la gare :

Vue sur l'armoire de distribution :

Vue sur les armoires contenant les variateurs de vitesse :

Celles-ci comprennent les variateurs du contour :
Les variateurs des moteurs du lanceur et du ralentisseur :
Et les variateurs des cadenceurs :

D'autres photos sont présentes dans la galerie :
ici.


 Monts-Jura, le 07 mars 2012 - 16:31 , dit :
Monts-Jura, le 07 mars 2012 - 16:31 , dit :
 Aide
Aide
 Guigui74
Guigui74 



 des années 1980.
des années 1980.








 />/>
/>/>  />/>
/>/> 
